
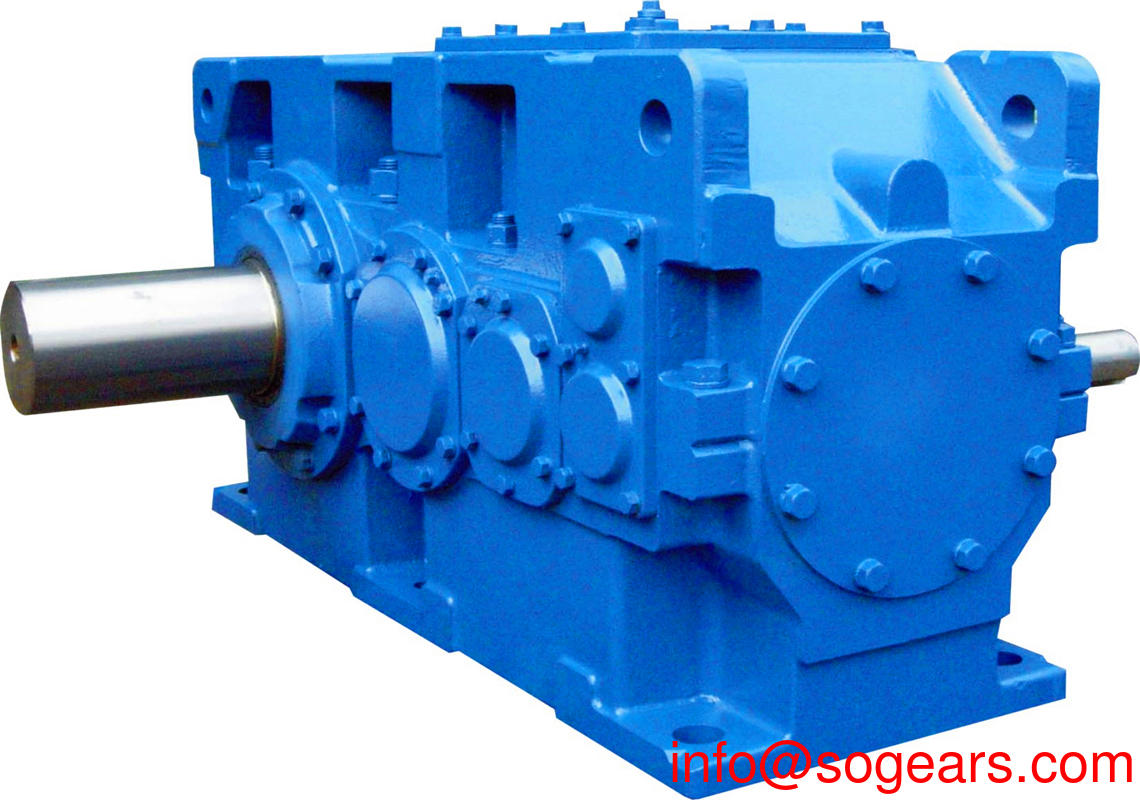
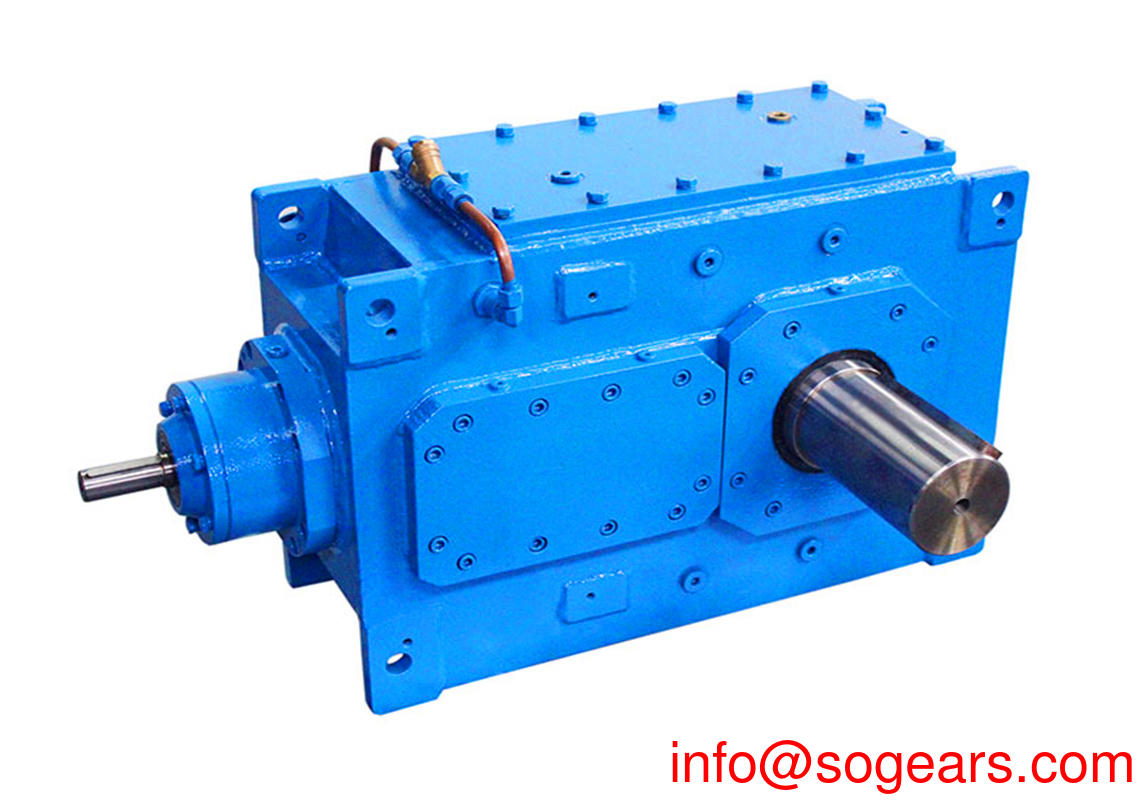
Stappermotor planetêre ratkas
Die trapmotor planetêre ratkas is hoofsaaklik gebou met 'n sonversnelling, 'n planetêre rat, 'n binneringrat en 'n planeetdraer.
Om die vragte van die drie planeetwiele eweredig te versprei, word 'n tandemeganisme gebruik, dit wil sê, die sonversnelling of die planeetdraer dryf, of albei dryf die sonversnelling en die planeetdraer op dieselfde tyd. Die ratte in die trapmotor se planetêre ratkas is 'n reguit tand-inloop-silindriese ratte. Het die volgende eienskappe:
- Klein in grootte en lig in gewig. Onder dieselfde omstandighede is dit 1 / 2 of ligter as die gewone, opgerolde silindriese ratkas, en die volume is 1 / 2 tot 1 / 3.
2, die transmissiedoeltreffendheid is hoog: enkelstap-trapmotor planetêre ratkas bereik 97% ~ 98%; tweestap-trapmotor planetêre ratkas bereik 94% ~ 96%; drievoudige treppermotor planetêre ratkas 91% ~ 94%.
3, die transmissievermoë is groot: dit kan van minder as 1KW tot 1300KW wees, of selfs groter.
4, die transmissiereeks is groot: i = 2.8 ~ 2000
5, aanpasbaarheid en duursaamheid. Die hoofonderdele is vervaardig van hoë gehalte legeringsstaal deur te vergaar en te blus of te nitriereer. Die planetêre ratkas met 'n trapmotor loop glad, met lae geraas en word meer as 10 keer gebruik.
6, gebruik en toepaslike voorwaardes

Die trapmotor planetêre ratkas het drie horisontale reekse (NGW11-NGW121) en twee vlakke (NGW42-NGW122) drie (NGW73-NGW123). Dit word hoofsaaklik in metallurgie, mynbou, hef en vervoer masjinerie en toerusting gebruik, en kan ook gebruik word vir kragoordrag onder ander soortgelyke industriële en mynbou-toestande.


Servo-planetêre ratkas het die ingangspoed tot 18000 RPM (ongeveer planetêre ratkas se ratkas se grootte, hoe groter is die trapmotor se planetêre ratkas, hoe kleiner is die gegradeerde ingangsnelheid) hierbo, die industriële graad servo-planetêre ratkas-uitsetkrag is gewoonlik nie meer as 2000 nie nm, spesiale groot wringkrag-servo-planetêre ratkas kan meer doen as 10000 nm. Werktemperatuur in 25 ℃ na 100 ℃ of so, deur die vet te verander, kan dit die temperatuur van die werk verander.
Die werkingstemperatuur van die Servo-planetêre ratkas is gewoonlik van -25 ℃ tot ongeveer 100 ℃. Die maksimum invoerspoed kan die werkslewe van 18000rpm bereik. Die kumulatiewe werktyd van die gegradeerde invoerspoed is zbj19004-88 en zbj19026-90 geraas ≤70 db
Gids
1-trekkermotor planetêre ratkas
2-installasiemetode
3 belangrike parameters
4 die konsep
trapmotor planetêre ratkas

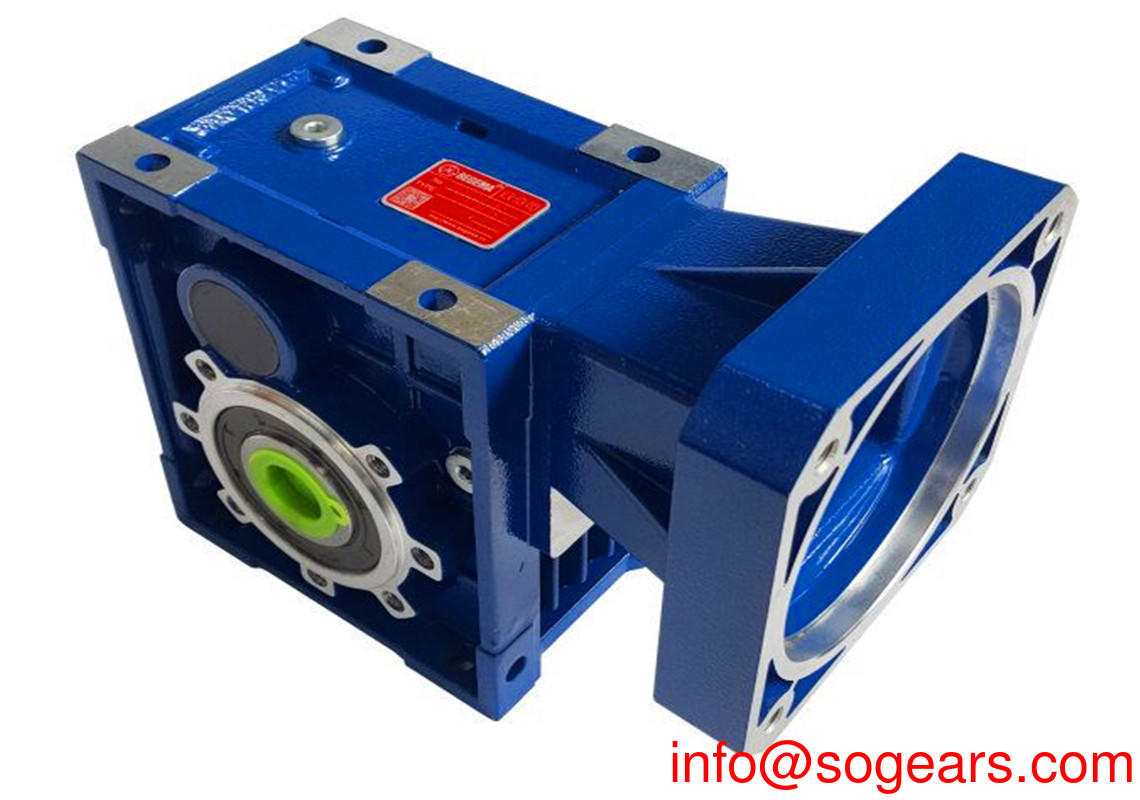
Die belangrikste transmissie-struktuur is: planeetwiel, sonwiel, buitenste ratring.Vergeleke met ander verminderingstoerusting, het servomotorreduksietoerusting 'n hoë styfheid, hoë presisie (enkelstap kan minder as 1-punt behaal), (dubbele trap kan minder as 3-punte behaal), hoë transmissiedoeltreffendheid (enkelstadium in 95-99%) , hoë wringkrag / volume-verhouding, gratis funksies vir lewensonderhoud.
As gevolg van hierdie eienskappe, is servo-planetêre ratkas meestal in die trapmotor en servomotor of borsellose motor geïnstalleer, wat gebruik word om die snelheid te verminder, die wringkrag te verbeter en die traagheid te pas.
Die gegradeerde insetspoed van servo-planetêre ratkas kan tot 18000rpm bereik (verwant aan die grootte van die planetêre ratkas van die steppermotor self, hoe groter die planetêre ratkas met 'n steppermotor, hoe kleiner is die gegradeerde insetspoed hierbo), die uitsetkrag van die industriële graad servo-planetêre ratkas oorskry gewoonlik nie 2000Nm nie

Installasie metode
Die korrekte installasie, gebruik en instandhouding van die planetêre ratkas met 'n treffermotor is 'n belangrike skakel om die normale werking van meganiese toerusting te verseker.Let dus op die volgende installasie en gebruik van verwante aangeleenthede, monteer en gebruik versigtig wanneer u die planetêre ratkas met 'n steppermotor installeer.
Die eerste stap is om te bevestig of die motor- en trapmotor-planetêre ratkas in 'n goeie toestand is voordat dit geïnstalleer word, en om seker te maak of die grootte van elke onderdeel wat met die motor- en stepper-motor-planetêre ratkas gekoppel is, ooreenstem. Hier is die grootte en bypassende verdraagsaamheid van die groef van die motor, die inlaatas, die inlaatas en die trappermotor.
Stap 2: skroef die skroef aan die buitenste stofdigte gat van die planetêre ratkas van die motor van die trapmotor los, pas die klemring van die PCS-stelsel in om die sygat in lyn te bring met die stofdigte gat, plaas die binneste seshoek om vas te trek.Verwyder daarna die sleutels van die motoras.Die derde stap is om die motor natuurlik met die planetêre ratkas van die steppermotor te koppel.Die konsentrisiteit van die uittree-as van die planetêre ratkas van die trapmotor en die ingangsas van die motor moet konsekwent wees wanneer hulle verbind word, en die buitenste flens van die twee moet parallel wees.As die konsentrisiteit nie konsekwent is nie, sal die motoras gebreek word, of die trekker van die motor se planetêre ratkas dra.Boonop moet u nie hamer en ander houe in die installasie gebruik nie, en voorkom dat die aksiekrag of die radiale krag te veel skade aan die laer of rat het.


Draai die bevestigingsbout vas voordat u die bout vasdraai.Vee die roesolie van die motorinlaatas, posisionering van die baas en koppel 'n deel van die stepper-motor-planetêre ratkas met petrol of sink-natriumwater voor installasie uit.Die doel daarvan is om noue verbinding en buigsaamheid van die werking te verseker, en onnodige slytasie te voorkom.Voordat die planetêre ratkas met die motor en die steppermotor gekoppel is, moet die sleutel van die motoras loodreg op die draaibout wees.Om 'n eenvormige krag te verseker, moet u eers die boute in enige skuins posisie skroef, maar nie styf vasskroef nie, en dan die installasieboute aan die ander twee skuinsposisies skroef en uiteindelik die vier boute een vir een skroef.Draai uiteindelik die kragbout vas.Alle draaiboute moet met die hand van die draaimomentplaat vasgemaak en gekontroleer word volgens die aangeduide wringkraggegevens.
Die korrekte installasie tussen planetêre ratkas en meganiese toerusting is dieselfde as korrekte installasie tussen planetêre ratkas en dryfmotor.Die sleutel is om te verseker dat die uittree-as van die planetêre ratkas met 'n trapmotor en die aandrywing deel van die as se konsentrisiteit is.
Belangrike parameter
Vertraagverhouding: verhouding van invoersnelheid en uitsetsnelheid.
Reeks: aantal stelle planetêre ratte.Oor die algemeen kan die maksimum drie bereik, en die doeltreffendheid sal verminder word.
Volle lasdoeltreffendheid: transmissiedoeltreffendheid van die planetêre ratkas met 'n treffermotor onder maksimum las (wringkrag van foutstop).
Werkslewe: die opgehoopte werkstyd van die trapmotor se planetêre ratkas met gegradeerde las en gegradeerde insetspoed.
Gemiddelde draaimoment: dit is die draaimoment wat die gewaardeerde lewensduur vir lang loopduur moontlik maak.As die uittreksnelheid 100 r / min is, is die leeftyd van die planetêre ratkas met 'n steppermotor die gemiddelde lewensduur, sal die gemiddelde leeftyd van die planetêre ratkas van die trappermotor verminder word.Die planetêre ratkas met 'n trapmotor misluk as die uitlaatkrag twee keer groter is.
Geraas: eenheid dB (A), hierdie waarde is die insetspoed van 3000 r / min, geen las, 1 m weg van die meetwaarde van die planetêre ratkas van die trapmotor.

Reeks: die aantal stelle planetêre ratte. Aangesien een stel planetêre ratte nie aan die vereistes van 'n groter transmissieverhouding kan voldoen nie, is dit soms twee of drie stelle nodig om te voldoen aan die vereistes om 'n groter transmissieverhouding te ondersteun. As gevolg van die toename in die aantal planetêre ratte, word die lengte van die tweede of derde trapmotor-planetêre ratkas verhoog en die doeltreffendheid verminder.
Terugkeervryhoogte: wanneer die uittreepunt vas is en die inseteinde met die kloksgewys en antikloksgewys gedraai word om die gegewe draaimoment + -2% te produseer, is daar 'n klein hoekverplasing aan die ingangseinde van die planetêre ratkas van die steppermotor, wat die terugkeerklarings.
Servomotor is 'n enjin wat die meganiese komponente in 'n servostelsel beheer. Dit is 'n indirekte toerusting vir snelheidsverandering van 'n aanvullende motor.

Servomotor kan die snelheid beheer, posisie akkuraatheid is baie akkuraat, spanning sein kan omgeskakel word in wringkrag en spoed om die beheer voorwerp te dryf.Die rotorsnelheid van die servomotor word beheer deur die insetsein en kan vinnig reageer. Dit word gebruik as 'n uitvoerende element in die outomatiese beheerstelsel en het die eienskappe van klein elektromeganiese tydkonstante, hoë lineariteit en beginspanning, ens. Die ontvangde elektriese sein kan omgeskakel word in die hoekverplasing of hoeksnelheidsuitset van die motoras.Verdeel in DC en AC servomotore, is die belangrikste kenmerke daarvan dat, as die seinspanning nul is, daar geen rotasieverskynsel is nie, snelheid met die verhoging van die wringkrag en eenvormige afname.
Die basiese inligting
Chinese naam
servo motor
Buitelandse name
servo motor
tipe toerusting
Gebruik geleenthede
Outomatiese beheerstelsel

Gids
1 werkbeginsel
2 ontwikkelingsgeskiedenis
3 keuringsvergelyking
4 ontfoutingsmetode
5 prestasievergelyking
6 seleksie berekening
7 remmodus
8 punte vir aandag
9 vergelyking van eienskappe
10 omvang van gebruik
11 hooffunksies
12 voordele
Vou wysig hierdie werkbeginsel van die gedeelte
1. Servomeganisme word gebruik om die posisie, oriëntasie,

'N Outomatiese beheerstelsel waarin die uitsetbeheerde hoeveelheid, soos die staat, arbitrêre veranderinge in die insetdoel (of 'n gegewe waarde) kan volg.Servo-posisionering met 'n polsslag, dit kan basies verstaan, servomotor om 'n polsslag te ontvang, draai een puls van die ooreenstemmende gesigspunt om sodoende die verplasing te verwesenlik, omdat die funksie van die servomotor self 'n polsslag het, so elkeen rotasie Hoek van 'n servomotor, stuur die ooreenstemmende aantal pulse op hierdie manier uit, en die servomotor om pols te aanvaar wat die eggo vorm, of geslote lus. As gevolg hiervan, sal die stelsel weet hoeveel polse na die servomotor gestuur word , hoeveel ladingspuls weer op dieselfde tyd, op hierdie manier, kan 'n baie noukeurige beheer van die motorrotasie wees, om die akkurate posisionering te bereik, kan 0.001 mm bereik.GS servomotor word in borsel- en borsellose motor verdeel.Borselmotor lae koste, eenvoudige struktuur, groot aanloopkoppel, breë snelheidsreeks, maklik om te beheer, benodig onderhoud, maar onderhoud is nie gerieflik nie (koolstofborsel), elektromagnetiese interferensie, omgewingsvereistes.Dit kan dus gebruik word in kostesensitiewe algemene industriële en siviele toepassings.



Borsellose motor klein grootte, liggewig, groot uitset, vinnige reaksie, hoë snelheid, klein traagheid, gladde rotasie, stabiele wringkrag.Die beheer is ingewikkeld, maklik om intelligensie te realiseer, en die elektroniese kommutasie is buigsaam, wat vierkantgolf-kommutasie of sinusgolf-kommutasie kan wees.Motoronderhoudvry, hoë doeltreffendheid, lae bedryfstemperatuur, klein elektromagnetiese bestraling, lang leeftyd, kan in verskillende omgewings gebruik word.
2, AC-servomotor is 'n borsellose motor, verdeel in sinchrone en asinchroniese motor. Die huidige bewegingsbeheer word meestal sinchroniese motor gebruik, sy kragreeks is groot, kan baie krag doen.Hoë traagheid, lae maksimum rotasiesnelheid en met die toename in krag neem vinnig af.Daarom is dit geskik vir lae spoed en gladde werking.
3. Die rotor in die servomotor is 'n permanente magneet. Die driefase-elektrisiteit wat deur die bestuurder beheer word, U / V / W, vorm 'n elektromagnetiese veld.Die akkuraatheid van die servomotor hang af van die akkuraatheid van die enkodeerder (lynnommer).
Die ontwikkelingsgeskiedenis
Sedert die Indramat-afdeling van die Rexroth-onderneming van Duitsland, MANNESMANN in die 1978 Hannover-beurs

MAC permanente magneet AC servomotor en aandryfstelsel is amptelik in Sjanghai bekendgestel, wat aangedui het dat hierdie nuwe generasie AC Servo tegnologie die praktiese fase betree het.Teen die middel en laat 1980's het maatskappye 'n volledige reeks produkte gehad.Die hele servomark het oorgeskakel na wisselstelsels.Vroeë simulasiesisteme soos nul-drywing, anti-interferensie en betroubaarheid, akkuraatheid en buigsaamheid, sowel as onvoldoende, voldoen nie ten volle aan die vereistes van bewegingsbeheer nie, die afgelope paar jaar as die mikroverwerker, die toepassing van 'n nuwe soort digitale seinverwerker (DSP) ), 'n digitale beheerstelsel, kan die beheerdeel volledig uitgevoer word deur sagteware, genaamd DC servo-stelsel, driefase permanente magneet AC-servostelsel.

Tot dusver neem die meeste van die hoëverrigting elektriese servostelsels 'n permanente magneet-sinchrone AC-servomotor aan, terwyl die meeste bestuurdrywers vinnige en akkurate servosisteme vir digitale posisies gebruik.Tipiese vervaardigers sluit in Siemens van Duitsland, kohlmorgen van die Verenigde State en Panasonic en Yaskawa van Japan.
Die klein servo-motor en drywer word in Japan vervaardig deur 'n yaskawa-motor. Onder hulle is D-reeks geskik vir CNC-masjiengereedskap (maksimum snelheid is 1000r / min, wringkrag is 0.25 ~ 2.8n.m), en R-reeks is geskik vir robotte (maksimum snelheid is 3000r / min, wringkrag is 0.016 ~ 0.16n.m ).Daarna is ses reekse M, F, S, H, C en G bekendgestel.Die nuwe D-reeks en R-reekse is in die 1990's bekendgestel.Van die ou reeks van reghoekige golfaandrywing, 8051 MCU-beheer tot sinusvormige golfaandrywing, 80C, 154CPU en hek-skikkingbeheer, wringkrag van 24% tot 7%, en verbeter die betroubaarheid.Op hierdie manier is daar slegs 'n paar jaar om agt reekse (kragbereik van 0.05 ~ 6kW) te vorm, relatief volledige stelsel, om te voldoen aan die werkmasjinerie, hanteringsmeganisme, sweisrobotte, monteerrobotte, elektroniese komponente, verwerkingsmasjinerie, drukpers, hoë- spoedwikkelmasjien, kronkelmasjien en ander verskillende behoeftes.
Fanuc, 'n Japannese maatskappy wat bekend is vir die vervaardiging van CNC-masjiengereedskap, het ook s-reekse (13-spesifikasies) en l-reekse (5-spesifikasies) permanente magneet-servomotors in die middel van die 1980's bekendgestel.Die L-reeks het 'n klein traagheidsmoment en meganiese tydkonstante, en is geskik vir serwostelsels met 'n spesiale vinnige reaksie.

Ander Japanse vervaardigers, soos mitsubishi-motors (hc-kfs, hc-mfs, hc-sfs, hc-rfs en hc-ufs-reeks), Toshiba seiki (SM-reeks), okuma-ysterwerke (BL-reeks), sanyo electric (BL-reeks) reeks), en Rishi Electric (S-reeks), het ook deelgeneem aan die permanente magneet AC-servostelsel-kompetisie.
Die MAC-reeks AC-servomotors van die Indramat-afdeling van Rexroth het 7-raamgroottes en 92-spesifikasies
Die IFT5-reeks driefase permanente magneet AC servomotore van Siemens word verdeel in standaardtipe en kort tipe

AC servomotor en borsellose DC servomotor in die funksie van die verskil: AC servo is beter, want dit is sinusgolfbeheer, die wringkragrif is klein.DC servo is 'n trapesiumgolf.Maar DC servo is eenvoudiger en goedkoper.
Die maksimum snelheid van die hoogspoedas moet nie 1500r / min oorskry nie
Die perifere snelheid van die rat oorskry nie 10m / s nie;
Werksomgewingstemperatuur is -40 ° C -45 ° C;
Dit kan in beide voorwaartse en terugwaartse rigtings gebruik word.

trapmotor planetêre ratkas spesifikasies:
NGW enkelstap-trapmotor planetêre ratkas: NGW11, NGW21, NGW31, NGW41, NGW51, NGW61, NGW71, NGW81, NGW91, NGW101, NGW111, NGW121
NGW tweestap-trapmotor planetêre ratkas: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122
NGW driestap-trapmotor planetêre ratkas: NGW73, NGW83, NGW93, NGW103, NGW113, NGW123



NGW treffermotor planetêre ratkas spesifikasies:
Die spesifikasies van die trapmotor planetêre ratkas word in 12-raamgetalle verdeel volgens die transmissieverhouding, drywing en wringkrag, en enkelstap-, dubbel- en driefase-transmissies. Daar is 27 raamgetalle en 58-snelheidsverhoudings. Die besonderhede is soos volg:
trapmotor planetêre ratkas word verdeel in enkelstap-, dubbel- en driefase-transmissies: enkelstapmodelle is: NGW11-trapmotor-planetêre ratkas NGW21, NGW31, NGW41, NGW51-trapmotor planetêre ratkas NGW61, NGW71, NGW81, NGW91, NGW101, NGW111 , NGW121, NGWXNUMX;

Ontfoutmetode
1. Inisialisasieparameters
Inisialiseer die parameters voordat u bedrading doen.
Op die beheerkaart: kies die beheermodus;Stel PID-parameters terug op nul;Skakel die aktiveringssein standaard as die beheerkaart aangeskakel is;Stoor hierdie toestand om te verseker dat die beheerkaart in hierdie toestand is wanneer dit weer aangeskakel word.
Op die servomotor: stel die beheermodus in;Stel om eksterne beheer moontlik te maak;Die ratverhouding van die seinuitset van die kodeerder;Stel die proporsionele verhouding tussen die beheersignaal en die motorsnelheid in.In die algemeen word aanbeveel dat die maksimum ontwerpspoed van die servo-operasie ooreenstem met die beheerspanning van 9V.Byvoorbeeld, yamyang stel die snelheid ooreen met 1V-spanning en die fabriekswaarde is 500. As u slegs wil hê dat die motor onder 1000 RPM moet werk, stel hierdie parameter op 111.


2, verbinding
Skakel die beheerkaart af en koppel die seinlyn tussen die beheerkaart en die servo.Die volgende lyne moet aanmekaar gekoppel word: analoog-uitsetlyn van die beheerkaart, seine in staat stel, die seinverspreiding van die kodeer seine.Die motor en die beheerkaart (sowel as die rekenaar) word aangeskakel nadat die bedrading weer korrek is.Op hierdie punt moet die motor stilstaan en maklik deur eksterne kragte gedraai word. Indien nie, kyk dan na die instelling en bedrading van die aktiveringssein.Draai die motor met eksterne krag, kyk of die beheerkaart die verandering in die posisie van die motor korrek kan opspoor, anders kan u die bedrading en instelling van die enkodeersignaal kontroleer

3. Probeer die rigting
As die terugvoeringsein nie in die regte rigting is nie, moet die gevolge vir 'n geslote lus-beheerstelsel rampspoedig wees.Aktiveer die sein om servo via die beheerkaart aan te skakel.Hierdie servo moet teen 'n laer snelheid draai, wat die legendariese "zero drift" is.Daar is instruksies of parameters op die beheerkaart om nul-drywing te onderdruk.Gebruik hierdie instruksie of parameter om te bepaal of die snelheid en rigting van die motor deur hierdie instruksie (parameter) beheer kan word.As dit nie beheer kan word nie, kyk dan na die analoogbedrading en die parameterinstelling van die beheermodus.Bevestig om 'n positiewe getal te gee, motoriese voorwaartse rotasie, toename in die kodeerder;As 'n negatiewe getal gegee word, draai die motor terug en die aantal kodes word verminder.Moenie hierdie metode gebruik as die motor gelaai is en die slag beperk is nie.Toets moet nie te veel spanning gee nie, word aanbeveel onder 1V.As die rigting teenstrydig is, kan die parameters op die beheerkaart of motor verander word om dit konsekwent te maak.

4. Verhoed nul drywing
In die beheerde proses van geslote lus sal die bestaan van nul-drywing 'n sekere invloed op die beheereffek hê, en dit is beter om dit te beperk.Beheerkaart- of servokontroleparameters om nul-drywing te beheer, versigtig verstel sodat die motorsnelheid naby aan nul is.Omdat nul-drywing self ook 'n sekere mate van willekeur het, is dit nie nodig om die motorsnelheid absoluut nul te vereis nie.
5. Vestig geslote lusbeheer
Weereens word die servosignaal deur die beheerkaart vrygestel, en 'n klein proporsionele aanwins word op die beheerkaart ingevoer. Wat die wins is, kan dit slegs bepaal word deur te voel. As u nie seker is nie, moet u die minimum waarde wat deur die beheerkaart toegelaat word, invul.Skakel die inskakelsein van die beheerkaart en die servo aan.Op hierdie punt moet die motor die bewegingsinstruksies grof kan volg.

6. Pas die geslote lus-parameters aan
Die kontroleparameters is fyn ingestel om seker te maak dat die motor volgens die instruksies van die beheerkaart beweeg, dit is 'n moet, en hierdie deel van die werk, meer ervaring, kan hier slegs weggelaat word.
Vou wysig hierdie afdeling se prestasievergelyking
Prestasievergelyking tussen servomotor en trapmotor

As 'n ooplus-beheerstelsel het stepper-motor 'n wesenlike verhouding met moderne digitale beheertegnologie.Stapmotor word wyd gebruik in die digitale beheerstelsel in China.Met die voorkoms van 'n alles-digitale AC-servostelsel, word die AC-servomotor meer en meer in die digitale beheerstelsel toegepas.Om aan te pas by die ontwikkelingstendens van digitale beheer, word trapmotor of volledige digitale AC-servomotor as uitvoerende motor in bewegingsbeheerstelsel gebruik.Alhoewel die twee dieselfde is in die beheermodus (polstrein en rigting sein), is daar wesenlike verskille in werkverrigting en toepassing.Maak 'n vergelyking met betrekking tot die diensprestasie van albei nou.

Die oordragverhouding is: 2.0, 3.15, 3.55, 4, 4.5, 5, 5.6, 6.3, 7, 1.8, 9, 10, 11.2, 12.5, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX;
Tweestapmodelle is: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122;
Die transmissieverhouding is: 14, 16, 18, 20, 22.4, 25, 28, 31.5, 35.5, 40, 45.50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX, XNUMX

Die drie-vlak modelle is: NGW73, NGW83, NGW93, NGW103 ratstapmotor planetêre ratkas NGW113, NGW123 steppermotor planetêre ratkas;
Die transmissieverhouding is: 180, 200, 224, 250, 280, 315, 355, 400













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
Die beste diens van ons transmissiedryfkundige na u inkassie.
Ons Service
Kry in Touch
Yantai Bonway Manufacturer Co.ltd
ANo.160 Changjiang Road, Yantai, Shandong, China(264006)
T + 86 535 6330966
W + 86 185 63806647